下载啦:请放心下载,安全无病毒!
软件提交最近更新 热门排行 v1.30免费版 附安装教程")
0%
0%
OMRON SYSMAC STUDIO(集成开发环境软件) v1.30免费版 附安装教程
- 授权方式:免费软件
- 软件类型:国产软件 / 编程软件
- 软件大小:3.7 GB
- 推荐星级:

- 软件版本:v1.30免费版 附安装教程
- 运行环境:WinXP, Win7, Win8, Win10
- 更新时间:2020-01-04
本地下载文件大小:3.7 GB
- 点击评论
本地下载文件大小:3.7 GB
OMRON SYSMAC STUDIO是欧姆龙推出的一款集成开发环境软件,主要用于编程、调试、设置和维护NJ系列控制器、机器自动化控制器和etherCAT从站等,多适用于机械设计方面,软件支持32位和64位系统,需要的朋友速速下载吧!
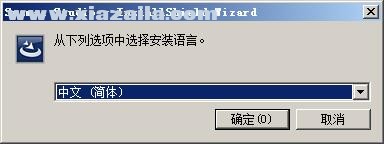
1、解压后双击“Setup.exe”,选择安装语言,默认中文简体,点击确定
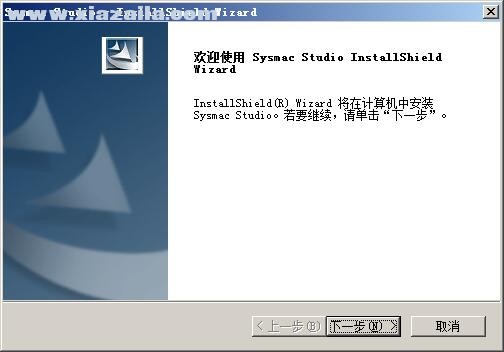
2、进入OMRON SYSMAC STUDIO的安装向导界面,点击下一步
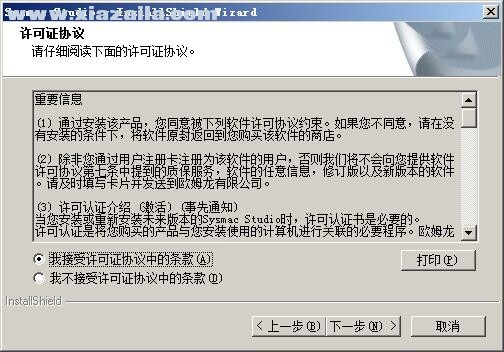
3、出现许可协议,选择我接受...
4、输入一下用户信息和序列号,序列号我们可以留空
5、选择使用软件的区域
6、选择软件安装目录,默认为“C:Program Files (x86)OMRON”,点击浏览可以自定义安装位置
7、继续选择安装类型,默认为完全安装
8、最后我们点击安装就开始SYSMAC STUDIO的安装了
9、完成后双击“License 1665.reg”导入注册信息就会完成破解了
真正的集成开发环境
为了让机器开发人员能够从一个单一的环境中完全控制,Sysmac Studio在一个简单的界面中集成了配置,编程,仿真和监控。这种先进的软件工具是NJ系列机器自动化控制器所需的唯一软件,它将逻辑,运动和视觉融合到一个平台上。IDE中的主要硬件产品系列是:
NJ / NX系列控制器
NA系列人机界面
NX系列I / O和安全
G5系列伺服
MX2系列和RX系列变频器
FH和FQM视觉系统和传感器
GX网络组件
E3 N-Smart传感器
ZW系列测量传感器
开源分布式版本控制系统
Sysmac Studio的Team Edition实现在平台丰富的界面中集成了分布式版本控制系统。它允许多个共同开发人员在同一个项目上工作,通过简单的项目比较和高效处理机器版本。欧姆龙选择了最受欢迎的开源分布式控制系统Git,使开发团队可以自由选择任何基于Git的云网络存储库。
版本控制系统允许工程师在本地版本的项目上完全控制项目源代码。对本地版本上的代码进行的改进和修改可以与远程服务器合并,以便其他团队可以访问代码。
符合熟悉的标准
Sysmac Studio完全符合开放标准IEC 61131-3,提供了基于梯形图,结构化文本编程语言和程序组织单元(包括程序,功能和功能块)的先进编程环境。此外,还包括基于PLCopen标准的运动控制指令和遵循IEC规则的指令集。提供一个熟悉的编程环境几乎消除了新软件的学习曲线,可以快速采用。
用变量编程
不需要学习NJ系列控制器的内部存储器映射。Sysmac Studio自动将CPU单元中的内存分配给您创建的变量,以促进更快的开发并减少错误。这也消除了在开始软件开发之前等待硬件的存储器地址定义的需要。硬件和软件可以独立设计,并行开发。
操作简单
Sysmac Studio在设计过程中尽可能少的限制,让您可以从系统的任何部分开始设计工作。这个设计理念具有易于理解的操作程序,并带有不妨碍工作流程的适当指南。这为灵活的设计工作提供了用户友好的操作,即使在设置和程序中的错误也可以立即纠正,或者直到项目完成后才可以纠正,只要不会导致严重事故。
完成调试
Sysmac Studio提供了用于调试顺序控制的完整功能,例如更改当前值和在线更改编程。它还提供了运动控制仿真的调试功能,例如以2D或3D显示结果以及在虚拟设备上显示轨迹。新的3D仿真工具为程序员提供了机会,可以看到他们选择实现的代码和配置的直接结果的物理移动和机器顺序。
最大的安全
在Sysmac Studio中,保护您的投资和保护机器的高级功能是标准配置。防止不正确的连接,操作或资产盗窃对于大型和小型项目都是至关重要的。控制器名称和序列号的确认,管理员访问权限和控制器写保护等功能可以保护您的机器,同时验证用户程序的执行和项目文件的密码保护,保护您的知识产权。使用32位安全密码,您的系统始终安全。
任务控制
NJ系列控制器和Sysmac Studio的功能,任务管理确保您的控制系统完全按照计划运行。NJ系列控制器使用的任务系统用于为I / O刷新和用户程序执行等一系列过程分配执行条件和执行顺序。这种新的控制级别允许程序员选择CPU在运行期间如何操作,以确保在机器的使用寿命中始终如一的快速操作。Sysmac Studio为您的任务设置以及强大的性能评估工具提供简单明了的调整。只显示任务选择的有效选项,指导用户进行适当的配置。一旦选择了一个配置,程序时间可以被监控,以确保最佳的操作。任务执行时间监视器可以与模拟器一起使用,以在下载到物理控制器之前显示执行时间。这些新的软件工具允许用户在实施之前预测机器的操作,而不是在调试期间响应意外的行为。
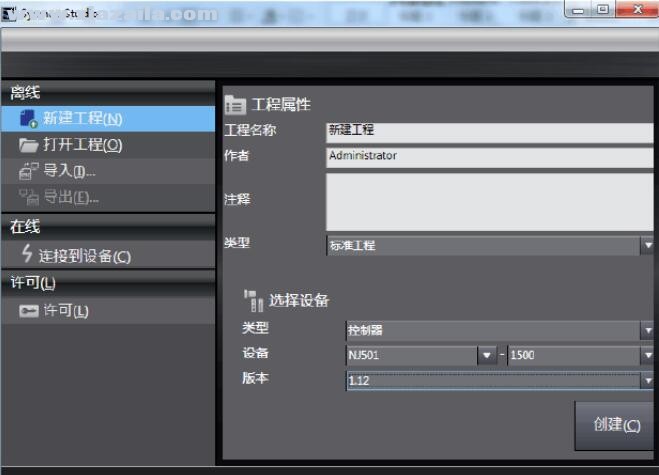
1、打开sysmac studio软件,点击“新建工程”,在右侧出现“工程属性”和“选择设备”可对工程进行命名及对PLC的选型。
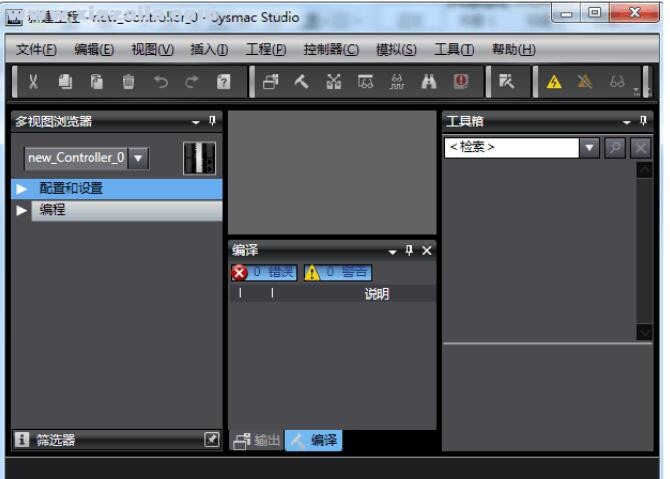
2、点击创建,进入编程界面。
3、点击“配置和设置”,选择EtherCat,选择“主设备”可在“工具箱”中全部供应商选择具体的设备,如:伺服、远程I/0、模拟量等。如果是添加非欧姆龙的伺服需添加ESI文件,点击“主设备”邮件,选择“显示ESI库”,点击“ESl库”下方绿色的“该文件夹”可添加对应厂家伺服的ESI文件,然后关闭软件,重新进入就可以选择刚刚添加的ESI文件。以(l/o和欧姆龙伺服为例)点击E001或者E002,可对节点地址进行修改。
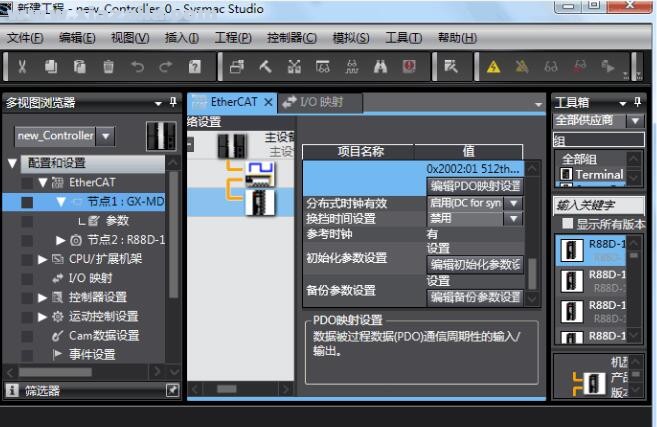
4、点击E002,右侧出现PDO参数设置,点击“编辑PDO映射设置”可增加或者删除PDO注意:分布式时钟有限必须为启用状态。

5、点击“运动控制轴”,选择“轴设置’”右键,添加“运动控制轴”,出现默认轴“MC_Axis000(0)”双击“MC_Axis000(0)”对伺服的相应参数进行设置。

6、轴使用:“使用的轴”,轴类型:“伺服器轴”,输出设备1:“选择对应的伺服”点击下方“详细设置”就可以对需要用到的伺服变量进行设置,如果有的选择了“设备”在对应的“过程数据”中未找到相关数据,可按照第四步中的PDo参数设置进行添加对应的PDO。

Copyright © 2018-2019 www.xiazaila.com. All Rights Reserved .
本站内容来源网络,均为用户提交发布或各大厂商提交,如有内容侵犯您的版权或其他利益的,请来信告知我们。










 高档编程语言(WinBatch)
高档编程语言(WinBatch) App Builder(web可视化开发工具)
App Builder(web可视化开发工具) atk xcom(正点原子串口调试助手)
atk xcom(正点原子串口调试助手) Code Composer Studio
Code Composer Studio 代码混淆保护工具(Code Virtualizer)
代码混淆保护工具(Code Virtualizer) FastDevPlat(可视化免代码开发平台工具)
FastDevPlat(可视化免代码开发平台工具)


软件评论 您的评论需要经过审核才能显示
网友评论